
 |
| Herkunftsort: | Jiangsu, China (Festland) |
| Markenname: | Jkongmotor |
| Zertifizierung: | CE, ROHS,ISO9001 |
| Modellnummer: | JK57HS56-2804 |
| Min Bestellmenge: | 3-10PCS |
|---|---|
| Verpackung Informationen: | mit Exportkarton. große Quantität mit Palette |
| Lieferzeit: | Für Proben 7-10 Tage/für Reihe, 15-25days |
| Zahlungsbedingungen: | T/T, paypal, Western Union, L/C |
| Versorgungsmaterial-Fähigkeit: | 100000pcs/month |
| Name: | Schrittmotor NEMA 23 | Bewegungsart: | Hybrider Schrittmotor |
|---|---|---|---|
| Vorbildliches Name: | JK57HS56-2804 | Nennspannung: | 2.52v |
| gegenwärtig: | 2.8A | Haltemoment: | 1.26N.m |
| Körperlänge: | 56mm | Welle: | 6.35mm oder 8mm |
| Fahrer: | DM542/JKD5056S | Verwendung: | Dieser kleine Schrittmotor kann auf den verschiedenen Gebieten, wie einem Drucker 3D, einer Stadiums |
| Markieren: | Motor CNC-NEMA 23 76mm,Schrittmotor 57BYGH311 NEMA23,Motor der Graviermaschine-57BYGH311 |
||
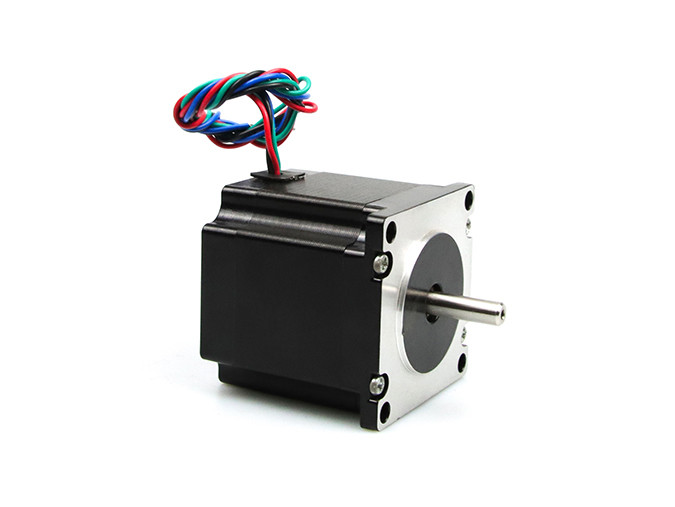
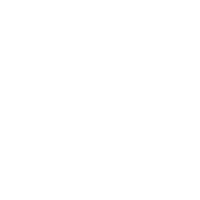
57BYG 57mm Schrittmotor NEMA 23 mit Fahrer 12v 24v 36v 2.8A 1.26N.M 2N.M 3N.M Used For Fräsmaschine CNC
NEMA 23 ist ein Schrittmotor mit einem Winkel des Zoll 2.3×2.3 (58.4×58.5 Millimeter) Frontplatten- und Schritt1.8° (200 Schritte/Revolution). Jede Phase zeichnet 2,8 A bei 3,2 V und lässt einen Haltemoment von 19 Kilogrammcm zu. Schrittmotor NEMA 23 wird im Allgemeinen in den Druckern, IN CNC-Maschine, in den Linear-Verstellgeräten und in den Festplattenlaufwerken benutzt.
Dieses ist das stärkste Modell für Schrittmotor NEMA 23, es mit 1,8 Grad. Schrittwinkel (200 Schritte/Revolution). Jede Phase zeichnet 4.2A und lässt einen Haltemoment von 3.0Nm zu (425oz.in).
Ein großer Schrittmotor, dieses NEMA 23 ist genug stark, große Lasten zu bewegen, die viel Veränderung durchmachen. Stepper dieses kann mit allen SlushEngine-Modellen verwendet werden. Es liefert 1,3 N.m des Drehmoments und kann reisen bis 400 U/min. Die Stepperreise 1,8 Grad pro Schritt.
NEMA 23 findet 3 Nanometer-Drehmomentgeschwindigkeit, aber sie ist veränderbar, indem sie die verschiedenen Arbeitsgeschwindigkeiten anwenden. Wirklich hängt das Drehmoment von den mehrfachen Faktoren, die das Zutreffen gegenwärtig sind, Spannungen ab und dritter Faktor ist die Induktion der Spule innerhalb des Motors.
Spezifikation 1.Genaral 57mm hybriden Schrittmotors:
| Name | Schrittmotor-NEMA 23 |
| Modell | JK57HS56-2804 |
| Bewegungsart | 2-phasiger Schrittmotor |
| Nennspannung | 2.52V |
| Haltemoment | 1.26N.m |
| Schritt-Winkel | 1,8 Grad oder 1,9 Grad oder 1,2 Grad |
| Gegenwärtig | 2.8A |
| Welle | 6.35mm oder 8mm D-geschnittene Welle |
| Verwendung |
JKONGMOTOR Schrittmotor ist ein Motor, der elektrische Impulskennzeichen in entsprechende eckige Verschiebungen oder lineare Verschiebungen umwandelt. Dieser kleine Schrittmotor kann auf den verschiedenen Gebieten, wie einem Drucker 3D, einer Stadiumsbeleuchtung, einem Laser-Stich, einer Textilmaschinerie, einer medizinischen Ausrüstung, einer Automatisierungsausrüstung, einem etc. weitverbreitet sein. |
Spezifikation 2.Electrical von Schrittmotoren Nema23 (1,8 Grad):
| Modell nein. | Schritt-Winkel | Bewegungslänge |
Gegenwärtig /Phase |
Widerstand /Phase |
Induktanz /Phase |
Haltemoment | # von den Führungen | Rasten-Drehmoment | Rotor-Trägheit | Masse |
| (°) | (L) Millimeter | Ω | mH | N.m | Nein. | g.cm | g.cm2 | Kilogramm | ||
| JK57HS41-1006 | 1,8 | 41 | 1 | 7,1 | 8 | 0,48 | 6 | 250 | 150 | 0,47 |
| JK57HS41-2008 | 1,8 | 41 | 2 | 1,4 | 1,4 | 0,39 | 8 | 250 | 150 | 0,47 |
| JK57HS41-2804 | 1,8 | 41 | 2,8 | 0,7 | 1,4 | 0,55 | 4 | 250 | 150 | 0,47 |
| JK57HS51-1006 | 1,8 | 51 | 1 | 6,6 | 8,2 | 0,72 | 6 | 300 | 230 | 0,59 |
| JK57HS51-2008 | 1,8 | 51 | 2 | 1,8 | 2,7 | 0,9 | 8 | 300 | 230 | 0,59 |
| JK57HS51-2804 | 1,8 | 51 | 2,8 | 0,83 | 2,2 | 1,01 | 4 | 300 | 230 | 0,59 |
| JK57HS56-2006 | 1,8 | 56 | 2 | 1,8 | 2,5 | 0,9 | 6 | 350 | 280 | 0,68 |
| JK57HS56-2108 | 1,8 | 56 | 2,1 | 1,8 | 2,5 | 1 | 8 | 350 | 280 | 0,68 |
| JK57HS56-2804 | 1,8 | 56 | 2,8 | 0,9 | 2,5 | 1,2 | 4 | 350 | 280 | 0,68 |
| JK57HS64-2804 | 1,8 | 64 | 2,8 | 0,8 | 2,3 | 1 | 4 | 400 | 300 | 0,75 |
| JK57HS76-2804 | 1,8 | 76 | 2,8 | 1,1 | 3,6 | 1,89 | 4 | 600 | 440 | 1,1 |
| JK57HS76-3006 | 1,8 | 76 | 3 | 1 | 1,6 | 1,35 | 6 | 600 | 440 | 1,1 |
| JK57HS76-3008 | 1,8 | 76 | 3 | 1 | 1,8 | 1,5 | 8 | 600 | 440 | 1,1 |
| JK57HS82-3004 | 1,8 | 82 | 3 | 1,2 | 4 | 2,1 | 4 | 1000 | 600 | 1,2 |
| JK57HS82-4008 | 1,8 | 82 | 4 | 0,8 | 1,8 | 2 | 8 | 1000 | 600 | 1,2 |
| JK57HS82-4204 | 1,8 | 82 | 4,2 | 0,7 | 2,5 | 2,2 | 4 | 1000 | 600 | 1,2 |
| JK57HS100-4204 | 1,8 | 100 | 4,2 | 0,75 | 3 | 3 | 4 | 1100 | 700 | 1,3 |
| JK57HS112-3004 | 1,8 | 112 | 3 | 1,6 | 7,5 | 3 | 4 | 1200 | 800 | 1,4 |
| JK57HS112-4204 | 1,8 | 112 | 4,2 | 0,9 | 3,8 | 3,1 | 4 | 1200 | 800 | 1,4 |
Spezifikation 3.Electrical des 57mm Schrittmotors (0,9 Grad):
| Modell nein. | Schritt-Winkel | Bewegungslänge |
Gegenwärtig /Phase |
Widerstand /Phase |
Induktanz /Phase |
Haltemoment | # von den Führungen | Rasten-Drehmoment | Rotor-Trägheit | Masse |
| (°) | (L) Millimeter | Ω | mH | kg.cm | Nein. | g.cm | g.cm2 | Kilogramm | ||
| JK57HM41-1006 | 0,9 | 41 | 1 | 5,7 | 8 | 3,9 | 6 | 210 | 120 | 0,45 |
| JK57HM41-2804 | 0,9 | 41 | 2,8 | 0,7 | 2,2 | 5 | 4 | 210 | 120 | 0,45 |
| JK57HM51-2006 | 0,9 | 51 | 2 | 1,6 | 2,2 | 7,2 | 6 | 380 | 280 | 0,68 |
| JK57HM56-1006 | 0,9 | 56 | 1 | 7,4 | 17,5 | 9 | 6 | 400 | 300 | 0,7 |
| JK57HM56-2006 | 0,9 | 56 | 2 | 1,8 | 4,5 | 9 | 6 | 400 | 300 | 0,7 |
| JK57HM56-2804 | 0,9 | 56 | 2,8 | 0,9 | 3,3 | 12 | 4 | 400 | 300 | 0,7 |
| JK57HM76-1006 | 0,9 | 76 | 1 | 8,6 | 23 | 13,5 | 6 | 680 | 480 | 1 |
| JK57HM76-2006 | 0,9 | 76 | 2 | 3 | 7 | 13,5 | 6 | 680 | 480 | 1 |
| JK57HM76-2804 | 0,9 | 76 | 2,8 | 1,15 | 5,6 | 18 | 4 | 680 | 480 | 1 |
Spezifikation 4.Electrical des Motors des Schrittes 3phase (1,2 Grad):
| Modell nein. | Schritt-Winkel | Bewegungslänge |
Gegenwärtig /Phase |
Widerstand /Phase |
Induktanz /Phase |
Haltemoment | Rasten-Drehmoment | Rotor-Trägheit | Masse |
| (°) | (L) Millimeter | Ω | mH | kg.cm | g.cm | g.cm2 | Kilogramm | ||
| JK57H3P42-5206 | 1,2 | 42 | 5,2 | 1,3 | 1,4 | 4,5 | 210 | 110 | 0,45 |
| JK57H3P56-5606 | 1,2 | 56 | 5,6 | 0,7 | 0,7 | 9 | 400 | 300 | 0,75 |
| JK57H3P79-5206 | 1,2 | 79 | 5,2 | 0,9 | 1,5 | 15 | 680 | 480 | 1,1 |
Spezifikation 5.Electrical des Schrittmotors der Endlosschleife:
| Modell nein. | Schritt-Winkel | Bewegungslänge |
Gegenwärtig /Phase |
Widerstand /Phase |
Induktanz /Phase |
Haltemoment | # von den Führungen | Rasten-Drehmoment | Rotor-Trägheit | Masse |
| (°) | (L) Millimeter | Ω | mH | N.m | Nein. | g.cm | g.cm2 | Kilogramm | ||
| JK57HSN12 | 1,8 | 56 | 4,2 | 0,4 | 1,5 | 1,2 | 4 | 350 | 280 | 0,98 |
| JK57HSN21 | 1,8 | 76 | 4,2 | 0,6 | 2 | 2,1 | 4 | 600 | 440 | 1,1 |
| JK57HSN30 | 1,8 | 112 | 4,2 | 0,9 | 4 | 3,0 | 4 | 1200 | 800 | 1,4 |
Spezifikation 6.Electrical von Bremse NEMA 23:
| Bremsmodell | BK2 |
| Haltemoment (Nanometer) | 2 |
| Spannung (V) | 24V |
| Länge L2 (Millimeter) | 32 |
Spezifikation 7.Electrical linearer Schraube NEMA 23:
| Schrauben-Durchmesser | Schrauben-Führung | Gewindesteigung | Reise pro Schritt | Schrauben-Durchmesser | Schrauben-Führung | Gewindesteigung | Reise pro Schritt |
| Millimeter | Millimeter | Millimeter | Millimeter | Millimeter | Millimeter | Millimeter | Millimeter |
|
Tr8
|
1 | 1 | 0,005 |
Tr8
|
10 | 2 | 0,05 |
| 2 | 2 | 0,01 | 12 | 2 | 0,06 | ||
| 3 | 1,5 | 0,015 | 14 | 2 | 0,07 | ||
| 4 | 2 | 0,02 | / | / | / | ||
| 8 | 2 | 0,04 | / | / | / | ||
| Schrauben-Durchmesser | Schrauben-Führung | Gewindesteigung | Reise pro Schritt | Schrauben-Durchmesser | Schrauben-Führung | Gewindesteigung | Reise pro Schritt |
| Millimeter | Millimeter | Millimeter | Millimeter | Millimeter | Millimeter | Millimeter | Millimeter |
|
Tr10 |
2 | 2 | 0,01 |
Tr12
|
2 | 2 | 0,01 |
| 3 | 1,5 | 0,015 | 3 | 3 | 0,015 | ||
| 4 | 2 | 0,02 | 8 | 2 | 0,04 | ||
| 8 | 2 | 0,04 | 10 | 2 | 0,05 | ||
| 10 | 2 | 0,05 | / | / | / | ||
| 12 | 2 | 0,06 | / | / | / |
8.Drawing des Schrittmotors NEMA 23:
![]()
Drähte 9.Lead des Schrittmotors 57mm NEMA 23:
![]()
Entwurf 10.Customized von cnc-Schrittmotor:
![]()
Art der Welle 11.Different:
![]()
![]()
12.Advantages des bioplar Schrittmotors
Da der Schrittmotor unter Verwendung eines Inputimpulses digitalgesteuert sind, sind sie für Gebrauch mit computergesteuerten Systemen passend.
Sie werden in der numerischen Steuerung von Werkzeugmaschinen benutzt.
Verwendet in den Bandlaufwerken, im schlaffen CD-Laufwerk, in den Druckern und in den elektrischen Uhren.
Der Schrittmotor verwenden auch im X-Y-Schreiber und in der Robotik.
Es hat breite Anwendung in den Textilindustrien und in den Herstellungen der integrierten Schaltung.
Die anderen Anwendungen des Schrittmotors sind in den Raumfahrzeugen, die für wissenschaftliche Erforschungen der Planeten etc. gestartet werden.
Diese Motoren finden auch eine Vielzahl von Handels-, medizinischen und Militäranwendungen und auch verwendet in der Produktion von Zukunftsromanfilmen.
Ansprechpartner: Miss. Annie
Telefon: +8615995098661
Faxen: 86-519-88713769
Addresss: Gebäude A2, Hutang-Industriegebiet, Lingdao Rd, Wujin-Bezirk, Changzhou, China.Zip: 213162
Factory-Adresse:Gebäude A2, Hutang-Industriegebiet, Lingdao Rd, Wujin-Bezirk, Changzhou, China.Zip: 213162












